
Centimeter grade "Reach GPS" Postage Stamp size unit with uBlox
GNSS chipset side up (Intel Edison "WiFi webserver" chip on reverse)
GNSS chipset side up (Intel Edison "WiFi webserver" chip on reverse)
Quick Facts & Links for the time compressed:
- HARDWARE: Centimeter resolution differential GPS-GNSS with two powerful "Reach GPS" postage-stamp boards for under $700 !! See Reach GPS Intro Page and Reach RTK Starter Kit for under $700 US
- SOFTWARE: Post Process on a $300 WiFi laptop using open source RTKPOST / RTKLIB by Mr Tomoji Takasu. See GITHUB Page README file or see Source Archives

The author in 2000 with Novatel GPS-Station as
rover & 5.0 meter stadia pole to clear trees and
gain solid L1 and L2 carrier phase tracking
By 2003, "survey grade" GPS was $25-50K -- and a little more "push button" plug and play.

Circa 2002-2003, Leica 500 on Tripod
Now in 2016? Wow!
RECENT HISTORY: During 2016 Christmas to year's end "dead time" -- I was helping some UAV friends document & transfer a GNSS post processing workflow -- and was forced -- in a fun way -- to learn both "Reach GPS" and RTKPOST-RTKPLOT (based on RTKLIB).
LOCAL BASE EXAMPLE: Map picture is worth 1000s of nerd words. First a quick test "flight" where guru Ian Gates hiked the UAV rover around the edges of the driveway, concrete edges and paving lines for visual & repeatable ground tracks. The "MailBox" was the local reference station -- and was "fitted" with a "ReachGPS" unit -- acting as "Base" and recording local fixed observables. Pictured here are process Lat-Long path from plain ASCII text POS file -- generated as output by RTKPOST:
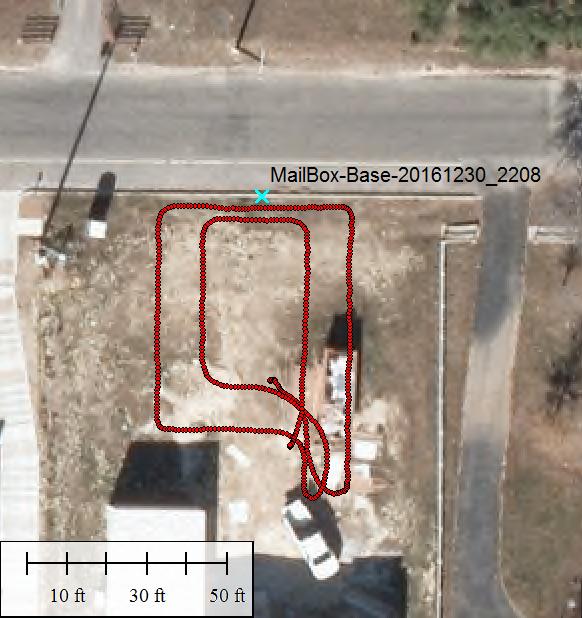
2013 six-inch aerial photo: Red "flight"/ground track
of UAV "Reach GPS" Rover along edges of driveway
& concrete. Note that driveway was under construction
[careful GE "aerials" are not always "good"])
DISTANT BASE EXAMPLE: The above UAV Rover set was post processed -- a second time -- via RTKPOST -- and this time using a "distant" (about 5Km) CORS Permanent GPS reference station TXBO (OBS files here). Resulting map was a bit different -- for reasons that shall become clear:

Same 2013 six-inch aerial: Green is Reach GPS "flight"/ground
track of Rover along same edges of driveway & concrete. The
green track is offset approx 4.65 feet SW-NE from red track.
Again please note that driveway was under construction in 2013.
WHY DIFFERENT? What caused the approx 4.65 foot offset SW-NE? After running a dozen RTKPOST sessions -- testing "personality" CONF parameter effects on RTKPOST -- this accident of fast training became apparent -- a difference in the "best guess" for MailBox reference station -- extracted from debug of *.POS outfiles from RTKPOST:
RED Ref XYZ: 29.793639547 -98.719151454 407.6388 (degs/degs/meters)
GRN Ref XYZ: 29.793631843 -98.719162737 404.8325 (degs/degs/meters)
Delta Diffs: 0.000007704 0.000011283 2.8063 (degs/degs/meters)
Cart Offset: 1.52(m) or 4.98 feet
Great Circle: 1.38(m) or 4.53 feet
Note the delta differences: These very closely match GIS/Map plotting SW-NE offset measurements from POS file overlay on aerials.
File Sources: The above XYZ (Lat-Long-Hgt) coordinates were extracted from RTKPOST files:
- "Rov_201612302215_MailBox_vs_Flite_v2.POS" (red) and
- "Rov_201612302215_MailBox_vs_Flite.POS" (grn).
- This is BIG: RTKPOST combined with "ReachGPS" can "see" consistent UAV flight and/or ground track differences of 4-5 feet. This is amazing for L1 code only GPS-GNSS receivers. Take away? With a little less time compression, it is clear from RTKPOST behavior that much tighter solutions can be obtained.
- Trash is Treasure -- Training "Errors" from ref station XYZ entry produced UAV rover repeatable results across different computers and using slight variations in the CONF personality run file (elev angle cutoff, mix of GNSS source signals, sky position blockage, multipath, etc). Take away? With a little care, RTKPOST is robust.
- Red vs Grn? Bad vs Good? No, not at all. Just a way to keep track of which was the "original" run by guru Ian Gates -- and which was run by this author in "trainee" mode.
- Compared to "high end" post processing workflows like GIPSY-OASIS / GAMET / GLOBK RTKPOST is "easy to use" and more or less "intuitive" (if you can see the GPS signal processing theory in your "mind's eye").